"DVDXpert" - компас в мире Hi-Fi и High End техники и другой stereo и home cinema аппаратуры.
Метод временных интерполяции ВИДЕО НА ОСНОВЕ объектной модели КАДРА |
21-05-2024 |
В статье предлагается метод интерполяции видео последовательности с целью повышения частоты кадров на стороне декодера. Оценка и компенсация движения выполняется на основе вычисления вейвлетного аппроксимаций оптического потока. Для улучшения качества интерполированных кадров предлагается компенсация движения с применением объектной модели кадра.
Большинство современных технологий, использующих обработку видеосигналов, сталкиваются с проблемой преобразования частоты кадров. Данная проблема возникает при передаче и сохранении видеоданных и затрагивает дискретизацию кадров (изображений) не только в пространстве, но и во времени. Изменение частоты кадров выполняется также при переходе от одного стандарта видео к другому (PAL / SECAM и NTSC), при восстановлении кадров были испорчены во время некачественной передачи. Поэтому необходимо предусматривать информацию в пропущенных / испорченных кадрах основываясь на имеющейся в соседних кадрах.
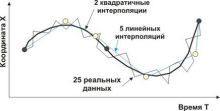
Поставленная проблема использует временную модель последовательности кадров и является типичной задачей интерполяции, в котором известная таблица значений функций при заданных значениях аргумента надо вычислить значения функции в промежуточных точках. Но, при использовании алгоритмов линейной интерполяции, заметные искажения изображений при воспроизведении съемке быстро движущихся: размытие границ, дрожь, прерывистость. Причина этих искажений заключается в том, что применение прямой интерполяции не всегда допустимо. Поэтому вместо прямой интерполяции применяется интерполяция с компенсацией движения.
В задачах обработки видео время может рассматриваться как дополнительное измерение. В связи с этим, в большинстве исследований видеосигнал рассматривается как трехмерная функция f (x, t), где x - двумерный вектор пиксельных координат, а t - время. С физической точки зрения f (x, t) - интенсивность изображения, как функция пространства и времени.
Таким образом, видеосигнал можно разложить в ортонормированной базис для трехмерных сигналов. Но, исходя из того, что наибольшие изменения изображения со временем является результатом движения сцены по отношению к видеокамере, такое представление сигнала малоэффективно. Это в первую очередь связано со смещением уровней яркости в кадрах видеопоследовательности.
 Принципиальная схема мостового регулятора тембра Принципиальная схема каскада ограничения тока, в котором управляющее напряжение формируется из напряжения сети Телевизионные и киностудии Трактовка звука как фактора формирования ТЕХНИКИ МУЗЫКАЛЬНОЙ КОМПОЗИЦИИ Формализованые и машинно-ориентированные информационные структуры.
Принципиальная схема мостового регулятора тембра Принципиальная схема каскада ограничения тока, в котором управляющее напряжение формируется из напряжения сети Телевизионные и киностудии Трактовка звука как фактора формирования ТЕХНИКИ МУЗЫКАЛЬНОЙ КОМПОЗИЦИИ Формализованые и машинно-ориентированные информационные структуры.